
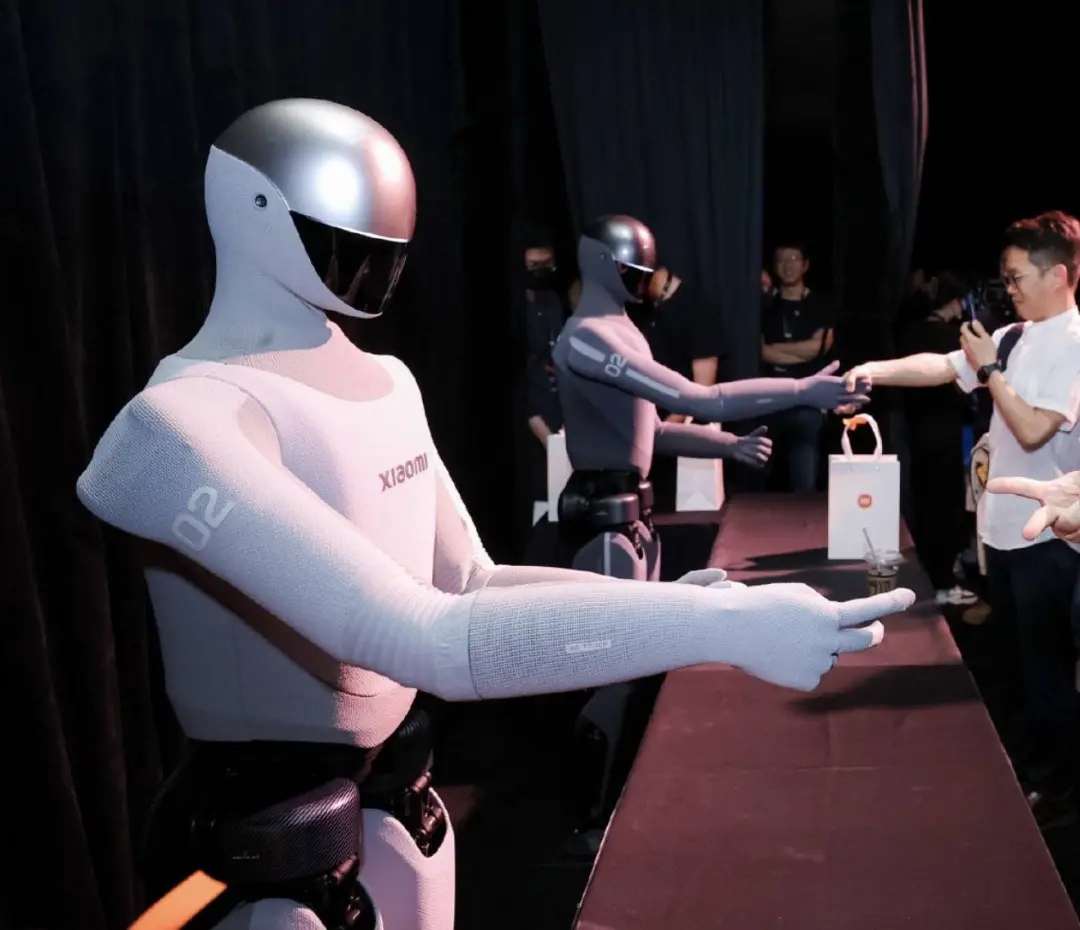
在前几日小米投资者大会上,一款尚未正式发布的人形机器人CyberOne V2悄然亮相,没有炫技般的奔跑跳跃,也没有吸引眼球的后空翻表演,它只是安静地站在那里,为与会嘉宾递上伴手礼,自然地与人握手、击掌,甚至比心,这种低调而真实的互动方式,反而让这款机器人成为当天最受瞩目的焦点,也让外界看到了小米在人形机器人领域的全新技术路径。
小米的CyberOne V2并没有将研发重心放在速度、负载与行走上,而是转向了更具实用价值的方向——灵巧手。
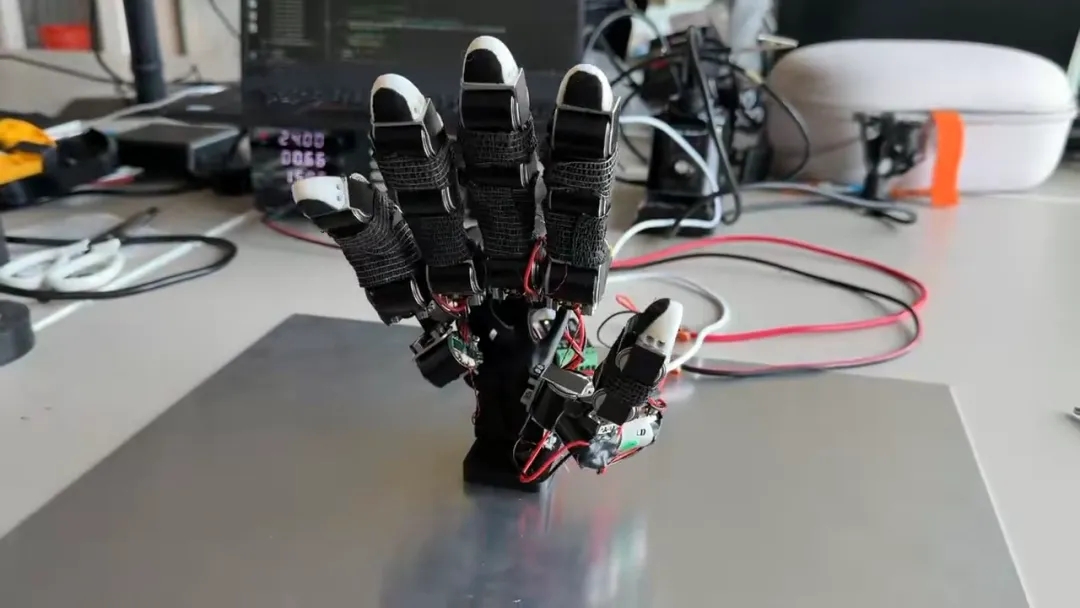
CyberOne V2的双手按照成年男性手掌1:1比例打造,体积较初代压缩了60%,却增加了64%的自由度。这双手不仅能完成拧螺丝、掌内转螺柱等工业场景的精细操作,还能轻柔地捏起羽毛、触碰气球,展现出惊人的力控精度。更令人惊叹的是,小米为这双手设计了独特的“仿生汗腺”系统,这一创新源于解决高功率电机的散热难题。
在机器人单手小臂内,高密度集成的电机总功率超过100W,其中30W会直接转化为废热,狭小空间内传统散热方案难以奏效。小米工程师从人类出汗散热中获得灵感,通过金属3D打印技术在小臂结构中制作微型液冷循环通道,利用微泵转移热量,再通过水分蒸发吸热降温。实测显示,这套系统每分钟仅需蒸发0.5mL水,就能提供约10W的主动散热能力,为长时间高强度作业提供了可靠保障。
为了让机器人手获得类人“手感”,小米引入了全掌触觉手套方案,将触觉传感器覆盖面积提升至 8200平方毫米。操作人员戴上手套完成动作打样,机器人就能完美复刻这些精细操作,解决了人手到机械手动作重定向的技术难题。这种重定向技术的核心挑战在于人手与机械手尺寸、关节数量和运动范围的差异,人类自然的动作直接映射到机器人手上可能导致不可达、穿模或接触点偏差,而触觉手套则通过真实触感数据解决了这一问题。
更重要的是,这双手的耐用性实现了突破。实验室环境下的简单操作与工业场景的持续作业有着天壤之别,小米仿生手在实际抓握测试中突破了15万次循环寿命,远超行业平均水平,为工厂大规模应用奠定了基础。雷军在微博中透露,这款灵巧手采用了“全掌触觉手套”“仿生结构设计”“类人汗腺散热”等多个创新解决方案,目标是让机器人在工作站长时间部署中达成接近100%的作业成功率。

硬件之外,CyberOne V2的 “大脑”同样值得关注。两个月前,小米开源了面向具身智能的VLA模型Xiaomi-Robotics-0,采用“大脑 + 小脑”混合架构,进一步提升机器人动作流畅度与执行效率。小米技术团队还开源了真机后训练的完整流程,最直观的数据是,基于预训练基座,用20小时的任务数据进行真机后训练,模型就能学会“把耳机放进耳机盒”这个高难度任务,并能连续完成多个耳机的收纳。

从行业发展来看,人形机器人的突破点正在从跑跳能力转向操作能力。虽然机器人半马已经刷新人类纪录,但翻书、系鞋带等人类日常手部操作对机器人来说仍是巨大挑战。具身智能的核心在于机器人通过物理躯体与现实世界交互,而灵巧手正是实现完美交互的最大硬件瓶颈,涉及软件上的动作重定向和硬件上的小型执行器设计两大难题。

小米在灵巧手领域的突破,不仅体现在技术参数上,更在于对实际应用场景的深刻理解。CyberOne V2没有追求炫技般的高难度动作,而是专注于拧螺丝、收耳机、递东西等看似简单却贴近日常的操作,这些恰恰是机器人走进工厂、家庭的关键能力。正如雷军所言,未来五年会有大批量人形机器人进厂干活,而这一切的基础,正是一双能真正干活的手。